-
Select

Location Sensing - Navigation
Introduction:
In context-aware computing and applications one of the most important parameters is "location" or "position". Many state-of-the-art technologies, e.g. Ambient Assisted Living, Proactive Computing, etc. the exact knowledge of the current position of a person, an equipment, a device, or other tangibles is of very high importance.
At the same time, considering the many sensors that are available today to measure basic properties (e.g. temperature, pressure, humidity, velocity, acceleration, etc.), it is surprising that precise location determination is still an open issue, as long as indoor applications are considered.
Whereas powerful system are at our disposal for outdoor positioning and navigation (e.g. GPS with resolutions down to the sub-centimeter range), equivalent systems for indoor use are not available yet, at least as long as low-cost is one condition.
Most location sensing systems are built around the following techniques:
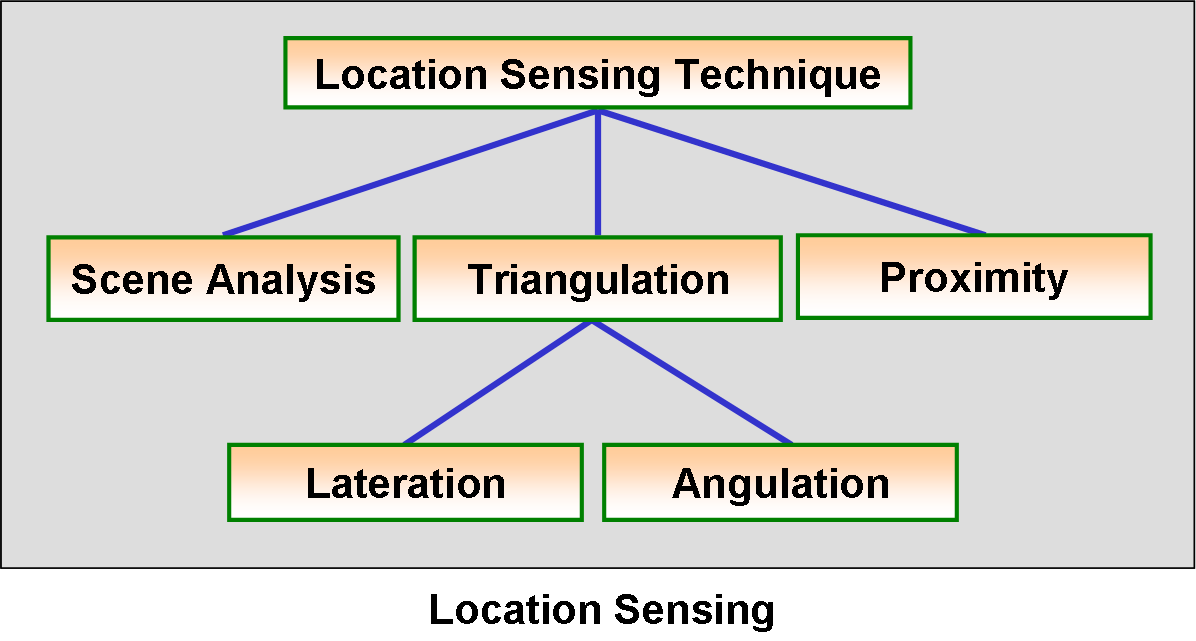
As indicated, three distinct techniques are used in location systems:
- Scene Analysis:
- Use features of a scene observed from a particular vantage point to draw conclusions about the location of the observer or of objects in the scene.
- Triangulation:
- Use the geometric properties of triangles to compute object locations.
- Proximity:
- Measure nearness to a known set of points. The object’s presence is sensed using a physical phenomenon with limited range.
Whereas in scene analysis generally cameras are employed in collaboration with adequate algorithms, the other two techniques use fundamental mechanical or physical properties to determine the parameters, needed for calculating a position or a navigation paths, etc.
Useful parameters are lengths, angles, speed, etc.
Techniques of location systems - Lateration:
Method:Compute the position of an object by measuring its distance from multiple reference positions, as shown in the following figure:
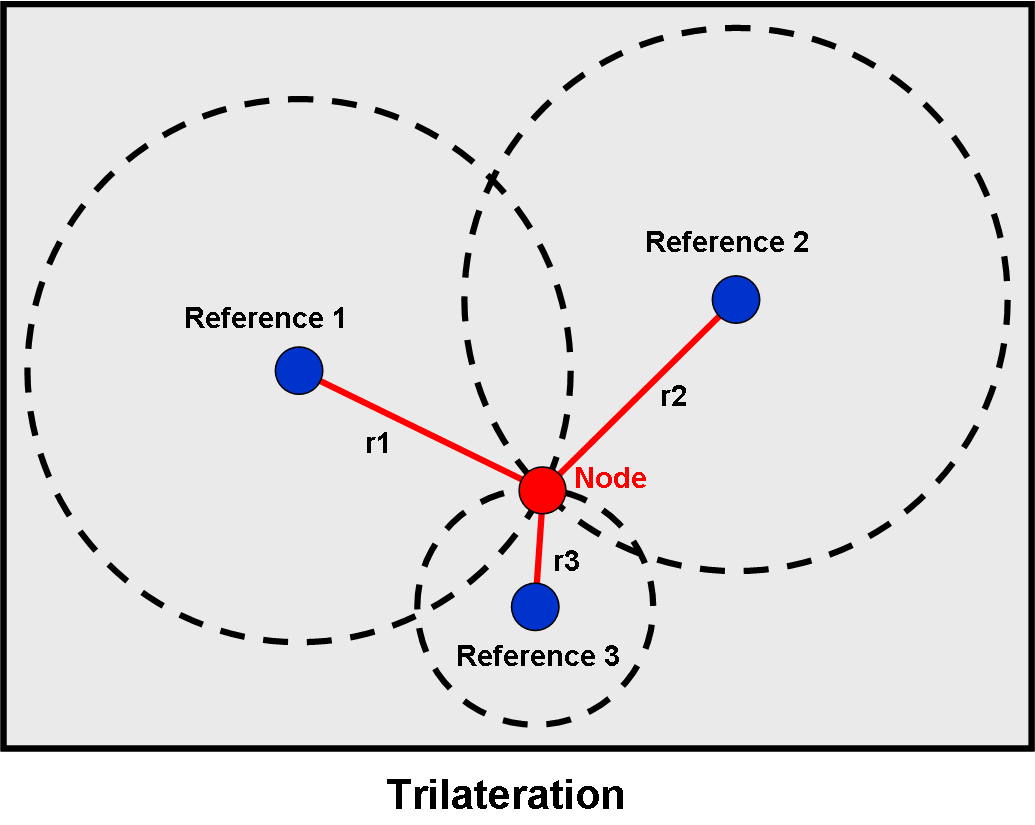
As can be seen from the above figure a minimum of three reference stations is necessary, in order to determine the unknown position of a device (node) in two dimensions. In some special cases this number can be reduced (see below).
It has to be pointed out that lateration is not the only way to determine the node position. An equivalent method - triangulation - uses three angles for the measurement instead of three distances. Obviously this can be modified further into a combination of distances and angles (e.g. one distance and two angles).
To determine the location the three distances (radii) r1 to r3 have to be measured. This can be done directly in a mechanical setup (obviously not possible in most cases) or (more realistic) using an indirect method.
Trilateration has the obvious advantage that many direct and indirect methods can be employed to measure a distance, as:
- Direct:
- uses physical action or movement.
- Time-of-Flight:
- measures the time it takes to travel between the two objects under consideration, when the velocity is known.
- Attenuation:
- using the emission of an appropriate signal (e.g. radio frequency, radiation, ultra sound, etc.) and a function correlating the signal strength to the distance from the original signal source (e.g. TX power).
The signal attenuation method is the preferred choice when working with modern wireless systems, because the communication itself is based on RF signals that can hence simultaneously be used for the distance measurement.
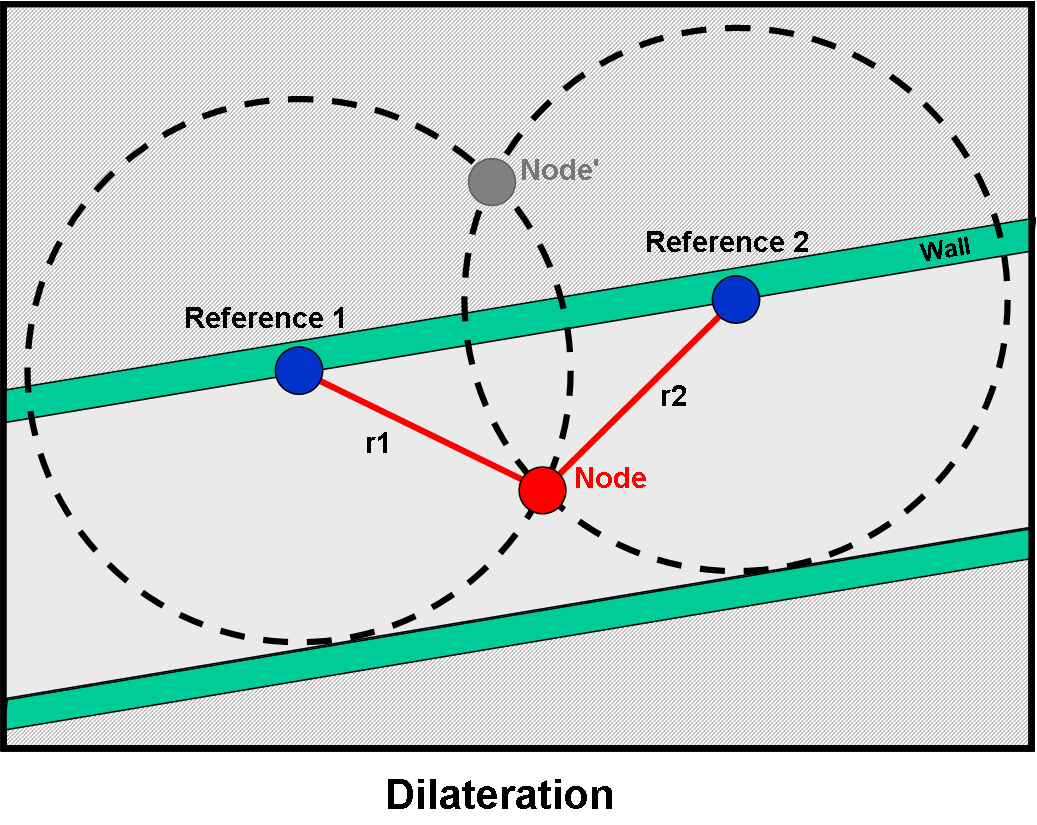
Techniques of location systems - Dilateration:
In some special cases the number of reference transmitters can be reduced and full trilateration is not necessary. This is especially true when only indoor localization or navigation is concerned. In this case the reference points will often be fixed to know locations, e.g. walls that are part of know rooms or pathways, as indicated in the following figure.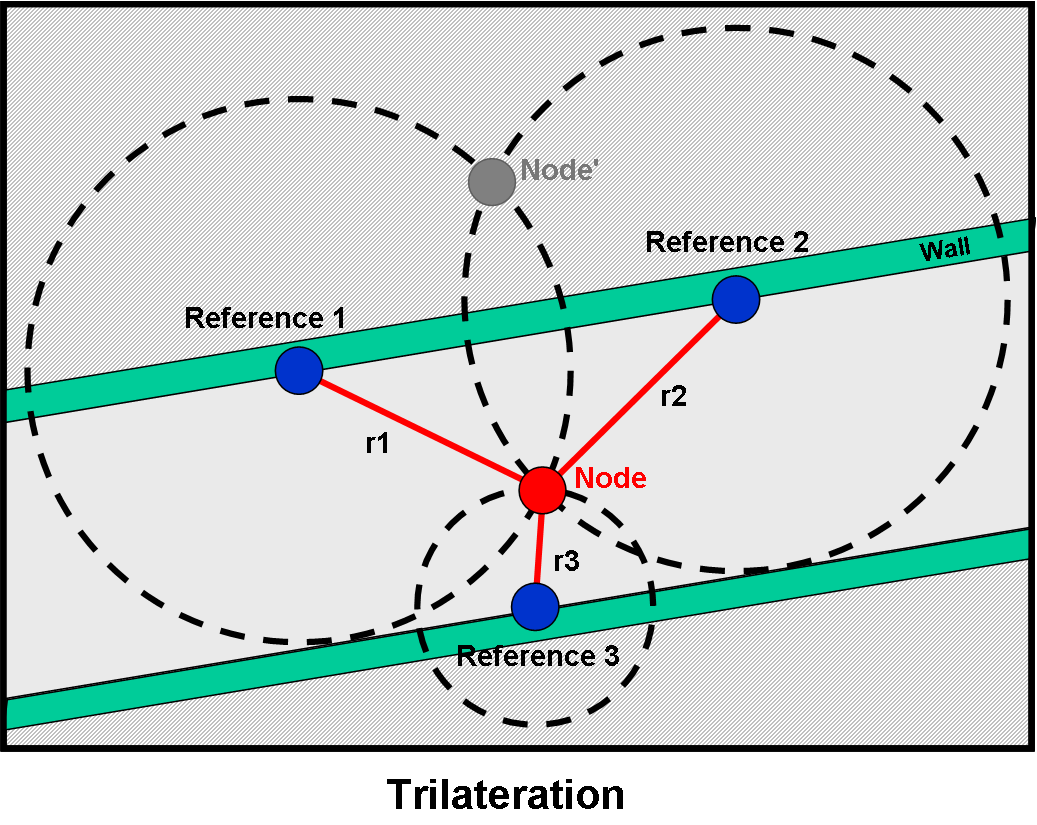
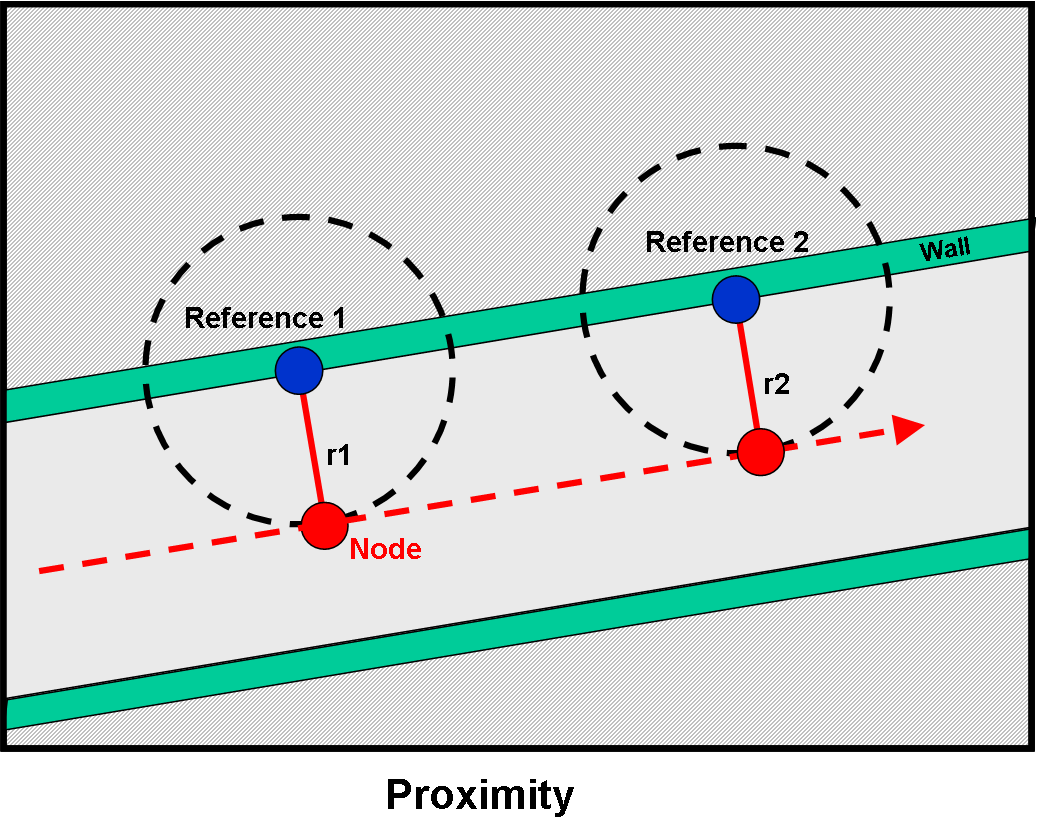
Techniques of location systems - Proximity:
A further reduction of reference points is only possible when a full position measurement is not required and instead the confirmation of the proximity to a certain object is sufficient. In many cases of current applications (e.g. shop floor navigation and focused advertisement) using the so-called iBeacon (see corresponding chapter) the term localization is often used, although in reality only a proximity measurement is performed. In some cases a simple proximity measurement (in a digital yes/no sense) is replaced by a distance estimate, e.g. by deviding the range into three different intervals (see iBeacon).
The following figure indicates how a moving object (e.g. person) can be quasi-located or traced simply by its proximity to the installed reference points (beacons).